
Encoder/Decoder in DNN
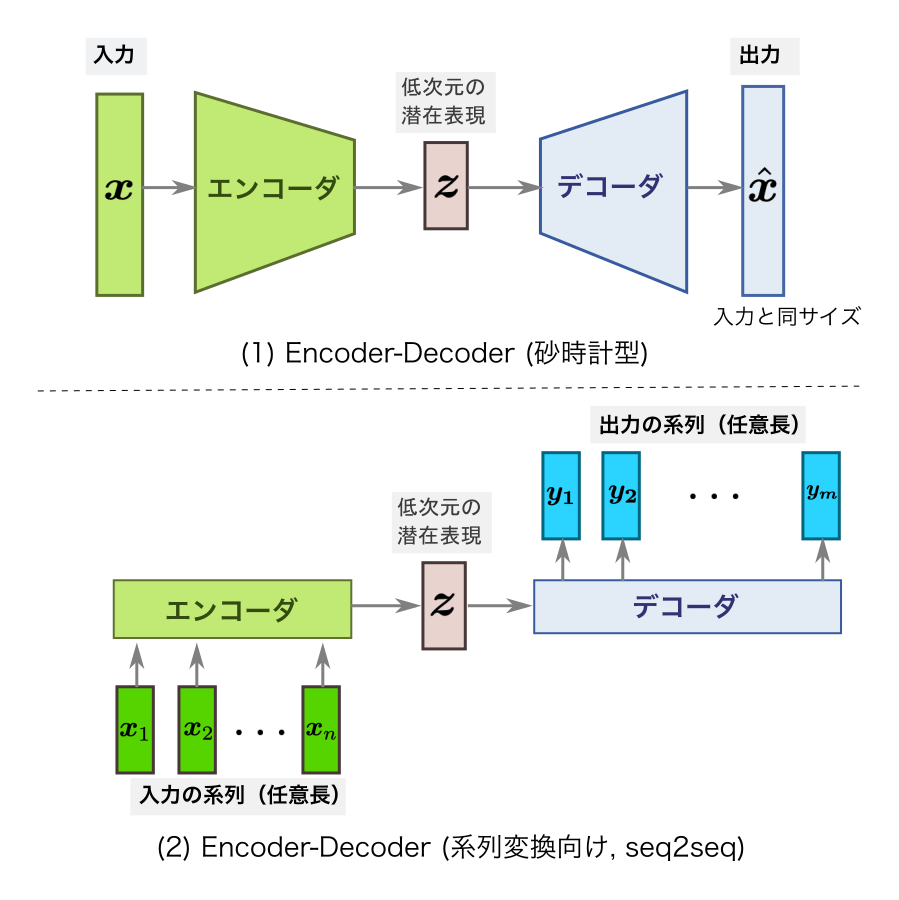
The encoder/decoder model is one of the key architectures in deep learning and is widely used, especially in sequence-to-sequence (Seq2Seq) tasks such as machine translation and speech recognition, as described in “Overview of the Seq2Seq (Seq-to-Seq) Model and Examples of Algorithms and Implementations. It is widely used in sequence-to-sequence tasks, as described in “Overview of the Seq2Seq (Sequence-to-Sequence) Model and Examples of Algorithms and Implementations” such as speech recognition. The model is structured to encode the input sequence into a fixed-length vector representation and then decode that representation to generate the target sequence.


The basic structure and functions of the encoder/decoder model are described below.
Encoder: The encoder is the part that processes the input sequence (e.g., text, audio waveform) and converts it into a fixed-dimensional representation. This representation can be thought of as a vector representation that encompasses the information of the entire input sequence, and the encoder is usually a recurrent neural network (RNN) as described in “Overview of RNNs, Algorithms, and Examples of Implementations,” or a long short-term memory network (LSTM) as described in “Overview of LSTMs, Algorithms, and Examples of Implementations. GRU described in “Overview of GRUs and examples of algorithms and implementations” or more recently, Transformer as described in “Overview of Transformer Models, Algorithms, and Examples of Implementations“.
1. RNN-based encoder: understands the entire sequence by recursively processing past information (i.e., using the output of one previous step as input for the next step).
2. LSTM/GRU-based encoder: a variant of RNN designed to learn long-term dependencies and store important information in the sequence.
3. transformer-based encoder: uses a mechanism called Self-Attention to efficiently handle information at different locations in a sequence. This architecture performs particularly well with long sequences and large data sets.
Decoder: The decoder takes a fixed-dimensional representation from the encoder and models it to generate the target sequence. The decoder generates the output sequences it wants to generate one at a time as tokens (words or characters). The decoder also consists of an RNN, LSTM, GRU, or Transformer architecture.
The main functions of the decoder are as follows
1. start token: Specifies the token that starts the generation of the target sequence. For example, for machine translation, the start token is usually “<start>”.
2. state initialization: takes information from the encoder, such as the final hidden state and context vector, and sets the initial state.
3. Predicting the next token: Using the current state and the last generated token, the next token is predicted. This prediction will typically be made using a probabilistic activation function such as a softmax function.
4. generation of an end token: Prediction and generation of the next token continues until a token indicating the end of the sequence (e.g., “<end>”) is generated.
Through these processes, the decoder is generating the target sequence while maintaining information about the input sequence. During training, the model calculates the loss between the generated sequence and the correct sequence and adjusts the model to minimize that loss.
Encoder/decoder models have been applied to many tasks such as language translation, conversational modeling, question answering systems, summarization, and speech synthesis, especially with recent developments such as transformers, which are methods that have improved performance for long sequences and large data sets.
Overview of Encoder/Decoder Model in GNN
Encoder and decoder models in Graph Neural Networks (GNNs) provide a framework for learning feature representations (embeddings) from graph data and using these representations to solve various tasks on the graph. This section provides an overview of encoder and decoder models in GNNs.
Encoder Model: The encoder model in GNN takes as input the graph structure and node/edge features and generates a representation (embedding) of the nodes from this information. There are several types of encoder models in general, the most representative of which are as follows.
1. Graph Convolutional Networks (GCN): GCNs are convolutional neural networks that use information from neighboring nodes to update the representation of a node, and a typical GCN uses the following procedure
- Aggregate features from each node’s neighbors and combine them with its own features.
- A linear transformation is performed on the aggregated features using a weight matrix.
- Further, an activation function (e.g., ReLU) is applied to make the features nonlinear.
2. GraphSAGE (Graph Sample and Aggregator): GraphSAGE will perform random walks and sampling of neighboring nodes to aggregate node features. It updates the representation of the nodes in the following steps
- Aggregate the features of neighboring nodes sampled from around each node.
- A linear transformation is performed on the aggregated features using a weight matrix.
- Combine the aggregated features with the original node features to obtain the final representation.
Decoder Model: The decoder model of a GNN solves a specific task using the representation of the nodes in the graph learned from the encoder model. The decoder model is an algorithm that takes as input the node representations in the graph obtained from the encoder and uses them to perform tasks on the graph. Decoder models include the following:
1. Node Classification: The node classification task is to predict whether or not each node belongs to a particular class or category. The class probability of each node is calculated using a softmax function, etc.
2. Link Prediction: The task of link prediction involves predicting the likelihood of the existence of unknown edges, and the GNN decoder model uses the node representations from the encoders to compute the probability of the existence of unknown edges.
3. Graph Generation: The graph generation task generates a new graph from a given set of conditions. The GNN decoder model implements an algorithm to generate new nodes and edges using the node representations in the graph obtained from the encoder.
The encoder model is the part that learns the representation of nodes from graph data, and Graph Convolutional Networks (GCN) and GraphSAGE are commonly used, while the decoder model is the part that solves tasks on a specific graph using the learned representation of nodes These include node classification, link prediction, and graph generation. These models are widely used to effectively capture features of graph data and solve various problems on graphs.
Algorithms related to encoder/decoder models in GNN
The following is a description of typical algorithms related to encoder and decoder models in GNNs.
Algorithms for Encoder Models:
1. Graph Convolutional Networks (GCN):
Overview: Convolutional Neural Networks that update the representation of a node using information from neighboring nodes. For more information on GCNs, see “Graph Convolutional Neural Networks (GCNs): Overview, Algorithms, and Examples of Implementations.
Features: Aggregate the features of nodes, combine the information with neighboring nodes, and apply linear transformations and activation functions to the aggregated features.
Representative paper: “Semi-Supervised Classification with Graph Convolutional Networks” (Kipf & Welling, ICLR 2017)
2. GraphSAGE (Graph Sample and Aggregator):.
Overview: Random walks and sampling of neighboring nodes to aggregate node see “GraphSAGE Overview, Algorithm, and Example Implementation” for more details on GraphSAGE. Features: Sampling and aggregating features from random walks and neighboring nodes, and combining the aggregated features with the features of the original node to obtain the final representation.
Representative paper: “Inductive Representation Learning on Large Graphs” (Hamilton et al., NIPS 2017)
3. Gated Graph Neural Networks (GGNN):
Overview: Recurrent neural networks that recursively update node neighbor information; see “Gated Graph Neural Networks (GGNN) Overview, Algorithms, and Examples” for more information on GCNNs.
Features: update node features and messages from neighboring nodes, and control information flow using a gating mechanism.
Representative paper: “Gated Graph Sequence Neural Networks” (Li et al., ICLR 2016)
Decoder Model Algorithms:
1. Graph Convolutional Networks (GCN):
Tasks: node classification, link prediction, graph generation, etc.
Overview: Solves a specific graph task using embeddings learned by the encoder model.
Features: Takes node embeddings as input and performs tasks using softmax functions, etc.
2. GraphSAGE (Graph Sample and Aggregator):
Tasks: Node classification, link prediction, graph generation, etc.
Overview: Solves specific graph tasks using embeddings learned from encoder models.
Features: Takes node embeddings as input and applies the appropriate model to perform the task.
3. Graph Neural Networks (GNNs) with Attention Mechanisms:
Tasks: node classification, link prediction, graph generation, etc.
Overview: Compute embeddings learned with encoder models, focusing on important nodes using attention mechanisms. For details, see “Overview of GAT (Graph Attention Network), Algorithm, and Implementation Examples.
Features: Computes a weighted sum of embeddings and performs a task using an attention mechanism.
Representative paper: “Graph Attention Networks” (Veličković et al., ICLR 2018)
Example of application of encoder/decoder model in GNN
Encoder and decoder models in GNNs have been applied to a variety of real-world graph data and used for a variety of tasks. Examples of their applications are described below. 1.
1. Node Classification:
Task: Prediction of user attributes (students, teachers, administrators, etc.) in social networks
Encoder model: Learning node representations using Graph Convolutional Networks (GCN), GraphSAGE, etc.
Decoder Model: Predicts attributes of each node using the learned representation of the node
2. Link Prediction:
Task: Predict the existence of new friendships in social networks
Encoder models: learn node representations using GraphSAGE, GCN, etc.
Decoder Model: Predicts the probability of the existence of unknown edges using the learned node representations
3. graph generation:
Task: Generate new molecular structures in chemoinformatics
Encoder model: learn a representation of the molecular structure using Graph Neural Networks (GNN)
Decoder Models: Generate new molecular structures using learned molecular representations
4. Graph Clustering:
Task: Cluster web pages based on page rank algorithm
Encoder model: learns a representation of a web page using GNN
Decoder model: group pages by clustering algorithm using learned page representations
5. Traffic Prediction:
Task: Predict urban traffic flow and suggest optimal routes
Encoder model: Learns a representation of the city’s traffic network using GNN
Decoder model: Predicts traffic flow and proposes optimal routes using the learned representation of the traffic network
6. Graph Anomaly Detection:
Task: Detect anomalous behavior patterns and network structures in social networks
Encoder model: learns anomaly levels of nodes and edges using GNNs
Decoder model: Detect and notify anomalous patterns using learned anomalies
Example implementation of encoder/decoder model in GNN
This section describes an example implementation of encoder and decoder models in Graph Neural Networks (GNNs). The following example uses Python and makes use of PyTorch Geometric, a major library.
Example implementations of the encoder model:
1. Graph Convolutional Networks (GCN):
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch_geometric.nn import GCNConv
class GCNEncoder(nn.Module):
def __init__(self, in_channels, hidden_channels, out_channels):
super(GCNEncoder, self).__init__()
self.conv1 = GCNConv(in_channels, hidden_channels)
self.conv2 = GCNConv(hidden_channels, out_channels)
def forward(self, x, edge_index):
x = self.conv1(x, edge_index)
x = F.relu(x)
x = F.dropout(x, p=0.5, training=self.training)
x = self.conv2(x, edge_index)
return x2. GraphSAGE:
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch_geometric.nn import SAGEConv
class GraphSAGEEncoder(nn.Module):
def __init__(self, in_channels, hidden_channels, out_channels):
super(GraphSAGEEncoder, self).__init__()
self.conv1 = SAGEConv(in_channels, hidden_channels)
self.conv2 = SAGEConv(hidden_channels, out_channels)
def forward(self, x, edge_index):
x = self.conv1(x, edge_index)
x = F.relu(x)
x = F.dropout(x, p=0.5, training=self.training)
x = self.conv2(x, edge_index)
return xDecoder model implementation examples:
1. Node Classification:
import torch
import torch.nn as nn
class NodeClassifier(nn.Module):
def __init__(self, in_channels, num_classes):
super(NodeClassifier, self).__init__()
self.fc = nn.Linear(in_channels, num_classes)
def forward(self, x):
x = self.fc(x)
return torch.log_softmax(x, dim=1)2. Link Prediction:
import torch
import torch.nn as nn
class LinkPredictor(nn.Module):
def __init__(self, in_channels):
super(LinkPredictor, self).__init__()
self.fc = nn.Linear(in_channels*2, 1)
def forward(self, x_i, x_j):
x = torch.cat([x_i, x_j], dim=1)
x = self.fc(x)
return torch.sigmoid(x)Example implementation:
import torch
import torch.nn.functional as F
from torch_geometric.nn import GCNConv
class GCNEncoder(nn.Module):
def __init__(self, in_channels, hidden_channels, out_channels):
super(GCNEncoder, self).__init__()
self.conv1 = GCNConv(in_channels, hidden_channels)
self.conv2 = GCNConv(hidden_channels, out_channels)
def forward(self, x, edge_index):
x = self.conv1(x, edge_index)
x = F.relu(x)
x = F.dropout(x, p=0.5, training=self.training)
x = self.conv2(x, edge_index)
return x
class NodeClassifier(nn.Module):
def __init__(self, in_channels, num_classes):
super(NodeClassifier, self).__init__()
self.fc = nn.Linear(in_channels, num_classes)
def forward(self, x):
x = self.fc(x)
return torch.log_softmax(x, dim=1)
# Graph data and model definition
import torch_geometric.datasets as datasets
from torch_geometric.data import DataLoader
from torch_geometric.utils import train_test_split
from torch.optim import Adam
dataset = datasets.Planetoid(root='./data/Cora', name='Cora')
data = dataset[0]
data.train_mask = data.val_mask = data.test_mask = data.y = None
data = train_test_split(data, num_val=500, num_test=1000)
model = GCNEncoder(dataset.num_node_features, hidden_channels=16, out_channels=16)
classifier = NodeClassifier(in_channels=16, num_classes=dataset.num_classes)
# training loop
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model, classifier = model.to(device), classifier.to(device)
optimizer = Adam(list(model.parameters()) + list(classifier.parameters()), lr=0.01)
def train():
model.train()
classifier.train()
optimizer.zero_grad()
out = model(data.x.to(device), data.edge_index.to(device))
out = classifier(out)
loss = F.nll_loss(out[data.train_mask], data.y[data.train_mask])
loss.backward()
optimizer.step()
return loss.item()
for epoch in range(1, 201):
loss = train()
print(f'Epoch: {epoch:03d}, Loss: {loss:.4f}')
# test
def test():
model.eval()
classifier.eval()
out = model(data.x.to(device), data.edge_index.to(device))
out = classifier(out)
pred = out.argmax(dim=1)
test_correct = pred[data.test_mask] == data.y[data.test_mask]
test_acc = int(test_correct.sum()) / int(data.test_mask.sum())
return test_acc
test_acc = test()
print(f'Test Accuracy: {test_acc:.4f}')In this example, the Cora dataset is used to perform the node classification task; GCN is used as an encoder to learn the node representation, then NodeClassifier is used as a decoder to perform node classification; data loading, training and testing are, done using PyTorch Geometric functionality.
Encoder/decoder model in GNNs: challenges and solutions
Below are the main challenges of encoder and decoder models in GNNs and how to deal with them.
1. over-training (overfitting):
Challenge: GNNs are sometimes applied to large graph data sets, in which case the models may be overfitted to the training data, resulting in poor generalization performance.
Solution:
Dropout: Randomly invalidate node and edge features during training to prevent over-training.
Regularization: Apply L1 or L2 regularization to control model complexity.
Data Augmentation: increase training data and improve generalization performance by randomly transforming nodes and edges of the graph.
2. graph size and scalability:
Challenge: Applying encoder and decoder models to large graphs is computationally expensive.
Solution:
Minibatch processing: Partition the graph into smaller subgraphs and process them in mini-batches to reduce memory usage.
Sampling: Learn a partial representation of a large graph by sampling randomly.
3. modeling temporal variation:
Challenge: In dynamic graphs, encoder models may not capture temporal changes well.
Solution:
Dynamic Graph Models: Use models that account for temporal variation (e.g., Dynamic Graph Convolutional Networks).
Snapshot Learning: Capture graphs as snapshots at regular time intervals and treat them as time-series data.
4. Robustness to node additions and deletions:
Challenge: In dynamic graphs, encoder and decoder models may not be able to cope with the addition of new nodes or the deletion of existing nodes.
Solution:
Online Learning: Update models as new data arrives to accommodate additions and deletions.
Incremental Learning: update the model by adding new data to the model and learning.
5. graph feature imbalance:
Challenge: In graph data, certain nodes or edges may have unbalanced features compared to others.
Solution:
Class Weighting: Add class weights to the loss function to compensate for imbalances.
Use sampling techniques: balance the data by undersampling or oversampling rare classes.
6. improve computational efficiency:
Challenge: GNNs are computationally expensive and can be time consuming for large graphs.
Solution:
Use GPUs: Use GPUs to perform parallel computations to increase computation speed.
Model optimization: Optimize the model structure to reduce redundant computations.
Reference Information and Reference Books
For more information on graph data, see “Graph Data Processing Algorithms and Applications to Machine Learning/Artificial Intelligence Tasks. Also see “Knowledge Information Processing Techniques” for details specific to knowledge graphs. For more information on deep learning in general, see “About Deep Learning.
Reference book is


“Graph Neural Networks: Foundations, Frontiers, and Applications“等がある。


“Introduction to Graph Neural Networks“


“Graph Neural Networks in Action“




AIシステム設計・意思決定構造の設計を専門としています。
Ontology・DSL・Behavior Treeによる判断の外部化、マルチエージェント構築に取り組んでいます。
Specialized in AI system design and decision-making architecture.
Focused on externalizing decision logic using Ontology, DSL, and Behavior Trees, and building multi-agent systems.


コメント